

Télécharger la version imprimable
La navigation est l’un des plus anciens modes de déplacement conçu par l’Homme. Au début du Néolithique, déjà, il y a 12 000 ans, des pirogues ont été construites. La propulsion se faisait à la force des bras grâce aux rames.
Ensuite, il y a 5 000 ans environ, la voile fait son apparition en Égypte puis, il y a 3 000 ans, en Océanie. Son utilisation est rudimentaire puisqu’elle ne peut être utilisée que quand le vent vient de l’arrière du bateau. Dans les autres situations, la rame est toujours utile.
La navigation à voile domine ensuite jusqu’au 18e siècle quand l’invention de la machine à vapeur permet d’actionner des roues à aubes ou, plus tard, des hélices.
Nous allons essayer de comprendre comment fonctionnent les différents modes de propulsion des navires : la voile, l’hélice, la roue à aube. Mais aussi comment un objet aussi lourd qu’un cargo en acier peut flotter à la surface de l’eau. Enfin nous aborderons aussi les techniques de navigation en mer : mesure de la vitesse, connaissance de la position et maintien d’un cap.
Un dossier skippé par Olivier Brasseur, animateur scientifique
Première parution : Ébullisciences n°355, décembre 2014 – janvier 2015
Avant tout, un bateau doit flotter sur l’eau. Mais comment fait-on pour faire flotter quelque chose de plus lourd que l’eau ?
Grâce à la poussée d’Archimède dont voici l’énoncé : « Tout corps plongé dans un liquide subit, de la part de celui-ci, une poussée verticale orientée de bas en haut, égale au poids du volume de liquide déplacé ». Un corps plongé dans un liquide paraît donc plus léger : son poids apparent est égal à son poids réel diminué de la poussée d’Archimède. Pour qu’un objet flotte, il faut que son poids apparent soit nul (il ne s’enfonce alors plus dans l’eau). Pour cela il suffit donc de lui donner une forme telle qu’il déplace, sans s’enfoncer complètement dans le liquide, une quantité d’eau dont le poids soit égal à son propre poids.
Prenons un cube d’acier d’un volume d’1 m³ et plongeons-le dans l’eau. Que se passe-t-il, sachant que la masse volumique de l’acier est de 7500 kg/m³ et que celle de l’eau est de 1000 kg/m³ ? Le cube d’acier pèse 75 000 Newtons : la poussée d’Archimède nécessaire à sa flottaison doit donc être égale à 75 000 N.
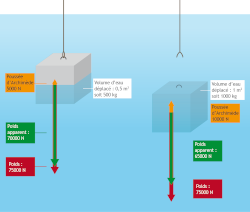
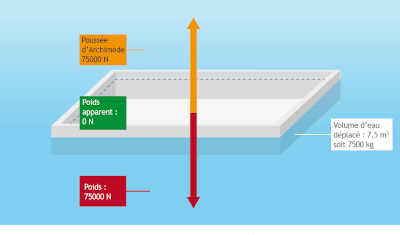
Si je souhaite que ce volume d’acier flotte, je dois lui donner une forme telle qu’il déplace un volume d’eau égal à 7,5 m³, volume d’eau qui pèse 75 000 Newtons. La hauteur nécessaire pour déplacer ce volume d’eau s’appelle le tirant d’eau. Il faut cependant encore pouvoir charger le bateau : la ligne de flottaison ne doit pas être trop haute. Il faut donc que le volume d’acier ait déplacé 7,5 m³ d’eau avant d’être complètement enfoncé. Idéalement le volume de mon bateau doit occuper un espace de 10 m³, il restera ainsi 2,5 m³ au-dessus du niveau de l’eau.
Masse – Poids
Il est temps ici de mettre fin à une confusion qui subsiste dans l’esprit de nombreuses personnes : le poids ne se mesure pas en kilogrammes mais bien en Newton ! Le kilogramme est l’unité de masse. Mais quelle est la différence entre ces deux grandeurs que sont le poids et la masse ?
Le poids est une force qui dépend de la masse mais aussi de la gravité : il est donc relatif (mon poids sur la Lune ne sera pas le même que sur la Terre).
La masse est absolue : pour un même objet, rien ne la fera varier (ni la position, ni la vitesse, ni rien du tout).
C’est donc un abus de langage de parler d’un poids en kilogramme (il est possible que la confusion vienne du nom de l’ancienne unité de poids : le kilogramme-force) 😉
Le poids s’exprime en Newton et est égal à la masse (en kg) multiplié par la pesanteur (≈10).
Le fait qu’un bateau évolue dans un fluide présente un inconvénient majeur : lorsqu’il se déplace, il est freiné. Ce phénomène est dû à la trainée, force qui s’oppose au mouvement du navire. La trainée peut avoir plusieurs origines :
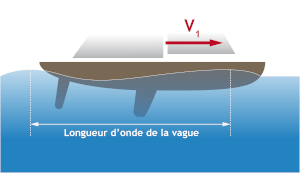
La trainée limite fortement la vitesse maximale des navires classiques car l’énergie pour la vaincre à haute vitesse est colossale. En effet, la traînée augmente avec le carré de la vitesse.
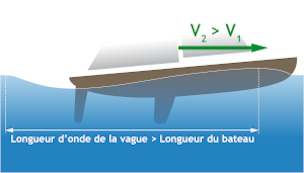
Une solution consiste à s’arranger pour faire évoluer le bateau légèrement au-dessus de l’eau afin de minimiser le contact entre la coque et l’eau. L’idée est donc de faire déjauger le navire : c’est alors la vitesse qui lui permet de s’élever par rapport à l’eau. On peut y arriver grâce à un système d’aile sous-marine, qui, sur le même principe que l’aile d’avion, va créer une portance et soulever le bateau. Seule l’aile sous-marine et son dispositif d’accrochage sont alors en contact avec l’eau. Le navire est moins freiné et peut alors atteindre des vitesses plus importantes. Ce sont les hydroptères ou les bateaux de type Jetfoil.

Les aéroglisseurs permettent également de se déplacer sur l’eau en minimisant les frottements : l’embarcation « flotte » alors sur un coussin d’air sous-pression situé sous la coque. Jusqu’en 2000, les Hovercrafts, utilisant cette technique, effectuaient la liaison Calais-Douvres. Ceci dit, peut-on encore parler de bateaux car ce type d’appareil n’est pas en contact avec l’eau ?
La navigation à voile est très ancienne, elle remonte au IIIe millénaire avant notre ère.
Le principe de base est très simple : tendre une voile qui fait obstacle au vent. Le vent pousse sur la voile qui, solidaire du bateau, avance dans la même direction que le vent. Peu importe l’orientation de la voile, la composante des forces qui fera avancer le bateau sera toujours perpendiculaire à la voile. Si la voile n’est pas parfaitement perpendiculaire au vent, le bateau avancera en « crabe » et la prise au vent sera moins bonne. Dans cette situation particulière, le vent doit venir de l’arrière du bateau. On dit que le bateau est en position « vent arrière » ou « largue ». Or il est assez rare que la direction du vent coïncide avec la direction prise par le bateau : ce principe ne s’applique quasiment jamais.
Cependant des techniques existent aussi pour faire avancer les navires lorsque le vent ne vient pas de l’arrière.
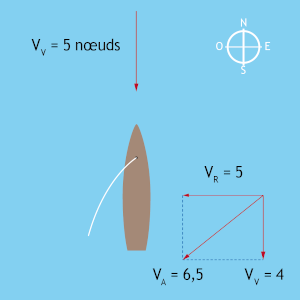
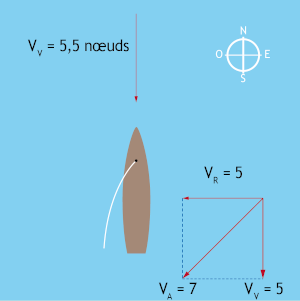
Voici donc quelques explications sur le fonctionnement de la propulsion à voiles pour différentes orientations du vent par rapport au navire.
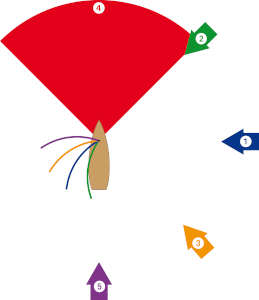
Cette «magie» a une limite. Quand l’angle formé par le vent apparent et l’axe du bateau devient trop faible, la voile ne peut plus se gonfler et l’effet de portance se réduit. On est bout au vent, c’est-à-dire quasiment vent debout (vent de face).
Les Chinois, dès le 10e siècle, avaient déjà imaginé ce type de propulsion pour leurs navires. L’énergie était alors toujours 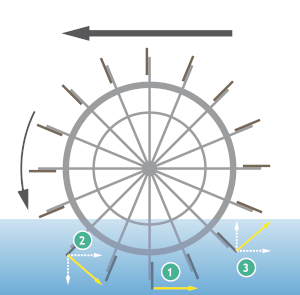 fournie par la force humaine. Ce n’est qu’à partir de la fin du 17e siècle, avec l’invention de la machine à vapeur, que la technique va pouvoir évoluer sensiblement.
fournie par la force humaine. Ce n’est qu’à partir de la fin du 17e siècle, avec l’invention de la machine à vapeur, que la technique va pouvoir évoluer sensiblement.
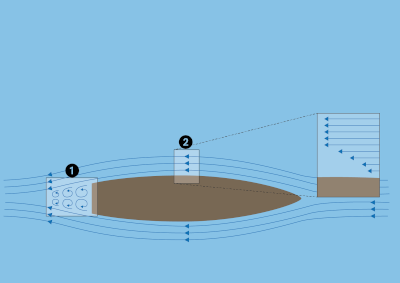
Dans son parcours autour de la roue dont elle est solidaire, il n’existe qu’une seule position dans laquelle une pale a une efficacité maximale : c’est quand elle est verticale, toute la poussée est alors horizontale (1). Avant d’arriver dans cette position, elle vient d’abord frapper l’eau puis poursuit son cheminement de biais par rapport à la direction idéale dans laquelle elle doit pousser sur l’eau. Une partie de la force est donc dirigée vers le fond de l’eau (2).
à la sortie de l’eau, une partie de la poussée se fait vers le haut. La pale à tendance à soulever l’eau (3). C’est pourquoi la vitesse des pales dans l’eau vaut 1,5 fois la vitesse du bateau. En principe, ce rapport doit être de 3 pour être idéal mais, dans ce cas, la perte d’énergie due à l’entrée et à la sortie des pales est trop importante.
Un système à cependant été mis au point pour limiter cet inconvénient. Une astuce technique permet aux pales de rentrer dans l’eau avec un angle adéquat qui tient compte, entre autres, de la vitesse du bateau. Elles ne se présentent donc pas de biais par rapport à la surface de l’eau et elles sont efficaces directement car toute la poussée est dirigée vers l’arrière du bateau. Il est alors possible d’approcher le rapport idéal de 3 entre la vitesse du bateau et celle de la roue à aubes.
Si tu veux voir ce système en fonctionnement : http://goo.gl/CLzf3N
En géométrie, l’hélice est « une courbe dont la tangente en chaque point fait un angle constant avec une direction donnée ».
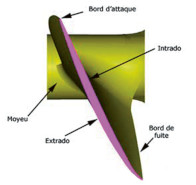
Une hélice de bateau actuelle est constituée d’un cylindre autour duquel sont fixées des pales. Chacune d’entre elle s’inscrit sur un plan, appelé hélicoïde, qui lui est propre. Chaque pale est donc un fragment d’un plan délimité par une hélice (mathématique) et une droite, l’axe, matérialisé par un cylindre.
Chaque pale est profilée de telle manière qu’elle présente un intrados et un extrados, comme une aile d’avion.
Le principe de l’hélice est de créer une dépression dans l’eau à l’avant de celle-ci et une surpression à l’arrière. La surpression créée à l’arrière accélère le volume d’eau qui traverse l’hélice. Par réaction, elle se déplace dans la direction opposée.
La forme et la taille des hélices sont très variables et ont fortement évolué à travers le temps afin d’améliorer, notamment, leur rendement. Le nombre de pales varie de 2 à 7 dans la plupart des cas.
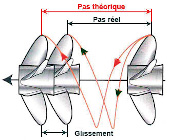 Une hélice est aussi caractérisée par son pas : c’est-à-dire la distance parcourue par un point de la pale en 1 tour d’hélice, en imaginant qu’elle se « visse » dans le milieu dans lequel elle évolue.
Une hélice est aussi caractérisée par son pas : c’est-à-dire la distance parcourue par un point de la pale en 1 tour d’hélice, en imaginant qu’elle se « visse » dans le milieu dans lequel elle évolue.
Cette notion est théorique car l’hélice évolue dans un fluide déformable : la distance réelle parcourue en un tour d’hélice est inférieure au pas théorique, c’est le pas réel. La différence entre pas théorique et pas réel s’appelle le glissement. Il est d’autant moins important que la coque du bateau est hydrodynamique.
 Pourquoi les pales ont-elles cette forme vrillée ?
Pourquoi les pales ont-elles cette forme vrillée ?
Un des paramètres d’une hélice est son diamètre. Lorsqu’une pale effectue un tour complet autour de son axe, son extrémité parcourt une plus grande distance que sa base : le pas varie. Ceci a pour effet une perte d’énergie. Pour contourner ce problème, l’angle d’inclinaison de la base de la pale est plus important que l’angle d’inclinaison de son extrémité. Ainsi le pas reste le même tout le long de la pale.
 La cavitation
La cavitationLorsque l’hélice tourne très vite, un phénomène potentiellement destructeur peut faire son apparition : la cavitation. En tournant, l’hélice crée une dépression sur son extrados : des bulles de gaz peuvent alors se former. Ces bulles implosent ensuite lorsque la pression redevient normale en provoquant une onde de choc, ce qui est source de bruit et de destructions potentielles. Le rendement de l’hélice est aussi diminué par ce phénomène. Les perfectionnements apportés ces dernières années aux hélices visent à réduire ce phénomène.
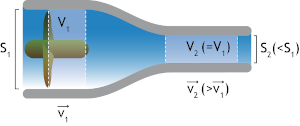
C’est un système de propulsion à réaction tout comme un réacteur d’avion. Dans ce cas, ce n’est pas de l’air qu’on accélère, mais bien de l’eau.
Une hélice est positionnée dans un conduit cylindrique. Elle sert à accélérer l’eau pompée sous le navire et est expulsée à l’air libre, à l’arrière du bateau. Cette importante masse d’eau est éjectée vers l’arrière du bateau, en réaction celui-ci se déplace vers l’avant.
Il est possible d’orienter le jet afin de diriger l’embarcation : donc plus besoin de gouvernail.
Les jet-skis sont équipés de ce système de propulsion, mais aussi des navires bien plus grands tels que des ferries (NGV entre la Corse et le continent).
S’orienter nécessite la connaissance de plusieurs paramètres : sa position (latitude et longitude), sa vitesse et le cap que l’on va prendre.
En marine, calculer sa position s’appelle faire le point. Cette tâche est impossible sans instruments de mesure. Dans ce cas, Il faut se contenter de faire ce que l’on appelle du cabotage, c’est-à-dire naviguer en permanence près des côtes, ce qui limite fort l’intérêt de la navigation, surtout si l’on souhaite explorer le globe.
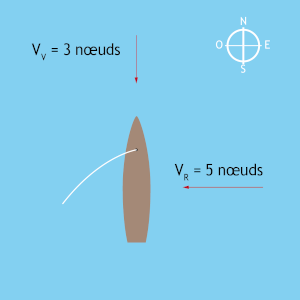
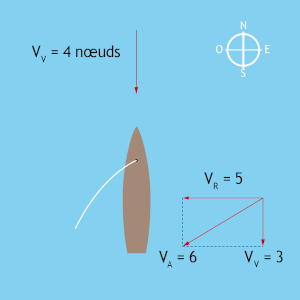
Si on possède une boussole, une carte, que l’on peut connaître sa vitesse, et qu’on identifie clairement le point de départ, il est déjà plus facile d’estimer régulièrement sa position. C’est ce que l’on faisait au 15e siècle grâce à des cartes simplifiées appelées portulans* (voir lexique) : on naviguait à l’estime. La position obtenue par cette méthode ne tient cependant pas compte des courants marins et de la dérive qui en découle, ni de la déclinaison magnétique qui peut fausser les mesures effectuées à la boussole. Cette méthode est donc peu précise.
Pour obtenir une plus grande précision quant à la position d’un navire à la surface du globe, il faut se baser sur la position des astres dans le ciel. Ces positions permettent de calculer les coordonnées d’un point, c’est-à-dire la latitude et la longitude.

Pour calculer la latitude d’un point, il faut pouvoir mesurer la hauteur d’un astre par rapport à l’horizon. Des instruments de mesures permettent de réaliser cela. Un des plus anciens est l’astrolabe*, qui existe depuis l’Antiquité. Ce sont les Arabes qui en ont répandu l’usage depuis le 7e siècle. Il y a aussi l’arbalète, sorte de bâton d’1,20 m sur lequel coulisse une équerre double, le quartier anglais, les quarts de cercle ou encore le sextant.
En mesurant, par exemple, la hauteur maximale du soleil dans le ciel, il est possible de connaître la latitude à laquelle on se trouve. À cause de l’inclinaison de l’axe de rotation de la Terre sur l’écliptique, cette hauteur maximale est différente tous les jours en tous points de la planète. Des tables sont éditées et fournissent, pour chaque jour, la valeur de ce que l’on appelle la déclinaison du Soleil, ce qui permet de corriger la mesure effectuée à l’aide des instruments. La déclinaison du Soleil varie de -23°27’ vers le 21 décembre à 23°27’ vers le 21 juin. Elle est égale à 0° les 21 mars et 21 septembre.
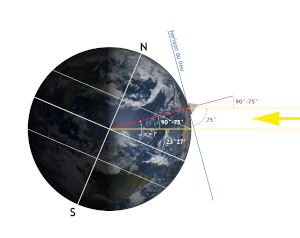
Exemple : à la date du 21 juin, je mesure, à l’aide d’un sextant, une hauteur de 75° vers le Sud pour le Soleil. Pour obtenir la latitude, je dois retrancher ces 75° de 90° : j’obtiens donc 15° de latitude Nord. La déclinaison du Soleil à cette date est de + 23°27’. Je dois donc rajouter cette valeur à celle obtenue précédemment : j’obtiens alors 38°27’ de latitude Nord.
Pour la longitude, c’est plus compliqué. En effet, entre le moment où je suis parti et le moment où je souhaite effectuer ma mesure, la Terre a tourné, chaque heure de 15° de longitude (puisqu’elle parcourt 360° en 24 heures). Pour pouvoir calculer la longitude du point où je me trouve, je dois connaître le décalage horaire depuis mon point de départ (méridien origine). Il faut donc une horloge,la plus précise possible. Pas question d’emmener une horloge à balancier dans un bateau qui tangue. Elle ne fonctionnera pas longtemps. Les seuls instruments qui existaient pour mesurer le temps dans un bateau étaient les sabliers. Il a donc fallu attendre la fin du 18e siècle, avec la fabrication de chronomètres sans balancier pour pouvoir calculer avec précision la longitude sur un bateau.
À l’aide d’un instrument tel le sextant, je mesure la hauteur maximale du Soleil et je note l’heure à laquelle j’effectue ma mesure : 15h00. Le midi du point auquel je me trouve ne correspond plus au midi de mon point de départ. Il y a 3 heures de décalage. Le midi local à donc 3 heures de retard par rapport au midi de mon point de départ. Comme la Terre tourne d’Ouest en Est, je suis situé vers l’Ouest par rapport à mon point de départ. En 1 heure la Terre tourne de 15°, elle parcourt donc 45° en 3 heures. Je suis donc à 45° à l’Ouest de mon point de départ (de mon méridien origine).
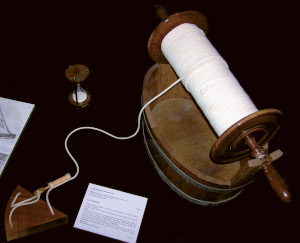 La vitesse d’un navire se mesure en nœuds. à l’origine, on utilisait le loch, qu’il suffisait de jeter à l’eau à l’arrière du bateau. Après quelques instants, la corde à laquelle il était accroché se déroulait et les nœuds défilaient par-dessus bord, tous les 14,5 m. Au passage du premier nœud, on retournait un sablier de trente secondes et l’on comptait les nœuds qui défilaient dans ce laps de temps. On s’est vite rendu compte que le loch était entraîné par le sillage du bateau : la distance qui sépare deux nœuds doit donc être légèrement supérieure. Cette distance a donc été fixée à 15,4 m. 30 secondes, ça correspond à 1/120 d’heure. En multipliant 15,4 m par 120, on obtient 1848 m, ce qui est proche de la valeur du mille marin (nautical mile) qui est de 1852 m. Une vitesse d’un nœud correspond à un mille par heure.
La vitesse d’un navire se mesure en nœuds. à l’origine, on utilisait le loch, qu’il suffisait de jeter à l’eau à l’arrière du bateau. Après quelques instants, la corde à laquelle il était accroché se déroulait et les nœuds défilaient par-dessus bord, tous les 14,5 m. Au passage du premier nœud, on retournait un sablier de trente secondes et l’on comptait les nœuds qui défilaient dans ce laps de temps. On s’est vite rendu compte que le loch était entraîné par le sillage du bateau : la distance qui sépare deux nœuds doit donc être légèrement supérieure. Cette distance a donc été fixée à 15,4 m. 30 secondes, ça correspond à 1/120 d’heure. En multipliant 15,4 m par 120, on obtient 1848 m, ce qui est proche de la valeur du mille marin (nautical mile) qui est de 1852 m. Une vitesse d’un nœud correspond à un mille par heure.
Le mille marin vaut 1852 m … à quoi cela correspond-il ? Un peu de géométrie. La circonférence de la Terre vaut, approximativement 40 000 km, soit 40 000 000 m. Cela représente 360°. Chaque degré d’arc correspond à 111 111,111 m et chaque minute d’arc correspond à 1851,85 m, soit en arrondissant 1852 m.
Le mille marin correspond donc à la distance parcourue sur chaque minute d’arc le long de la circonférence terrestre. Cette unité est très pratique pour les avions et les bateaux qui connaissent leur position selon leurs coordonnées géographiques (latitude et longitude), exprimées en degrés et en minutes.
Le cap, c’est la direction que prend le navire. Il correspond à l’angle formé depuis le Nord jusqu’à la direction du bateau. Il est mesuré positivement de 0° à 360 °, dans le sens des aiguilles d’une montre.
Le cap est mesuré à l’aide d’un compas, boussole montée sur deux axes de rotation perpendiculaires entre eux. Ce système permet de conserver à la boussole sa parfaite horizontalité malgré les mouvements de roulis et de tangage du navire.
Mais le cap donné par le compas doit être corrigé, et ce pour diverses raisons :
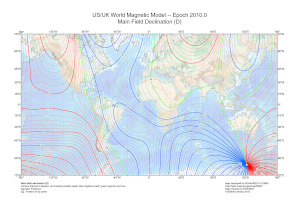 Le Nord fourni par une boussole correspond au Nord magnétique qui ne correspond pas parfaitement au Nord géographique (celui des cartes). L’écart entre les deux s’appelle la déclinaison magnétique. Elle est de quelques fractions de degrés en Europe, mais peut être plus importante dans certaines régions du Monde (voir carte). Elle varie également dans le temps.
Le Nord fourni par une boussole correspond au Nord magnétique qui ne correspond pas parfaitement au Nord géographique (celui des cartes). L’écart entre les deux s’appelle la déclinaison magnétique. Elle est de quelques fractions de degrés en Europe, mais peut être plus importante dans certaines régions du Monde (voir carte). Elle varie également dans le temps. Astrolabe : ancien instrument astronomique servant, entre autre, à la navigation. Il permet de mesurer la hauteur des astres et de calculer l’heure en fonction de la position des étoiles et du Soleil. Son invention et son utilisation en navigation remonte au 7e siècle.
Astrolabe : ancien instrument astronomique servant, entre autre, à la navigation. Il permet de mesurer la hauteur des astres et de calculer l’heure en fonction de la position des étoiles et du Soleil. Son invention et son utilisation en navigation remonte au 7e siècle. Dérive : surface portante immergée sous un navire et permettant de contrer la dérive due au vent. Elle est surtout utilisée sur les bateaux à voiles de tailles modestes.
Dérive : surface portante immergée sous un navire et permettant de contrer la dérive due au vent. Elle est surtout utilisée sur les bateaux à voiles de tailles modestes. Portulan : carte de navigation simplifiée utilisée au 13e siècle.
Portulan : carte de navigation simplifiée utilisée au 13e siècle.